
[V2X] HD Map
Updated:
- 자율주행을 위해 cm 수준의 정밀도를 갖춘 3D 입체 지도
- 도로 중심선, 경계선 등 차선 단위의 정보, 신호등, 표지판, 연석, 노면마크, 각종 구조물 등의 3차원 디지털 정보 포함
생성 방법
- MMS(Mobile Mapping System) 차량을 이용하여 도로 데이터 수집
- 정밀도가 높은 DGPS(Differential GPS, 2개 이상의 GPS를 의미)
- 차량 자체에서 계산되는 속도, 거리를 이용한 관성항법장치(INS, Inertial Navigation System)
- 차량 이동 거리를 통해 정확한 거리를 측정하는 DMI(Distance Measuring Instrument)
- 그 외 다수 카메라 등 이용
- 고속도로 톨게이트, 나들목, 분기점 등 다시 진입하기 힘든 곳은 드론을 이용하여 효율적으로 데이터 수집
Layer map
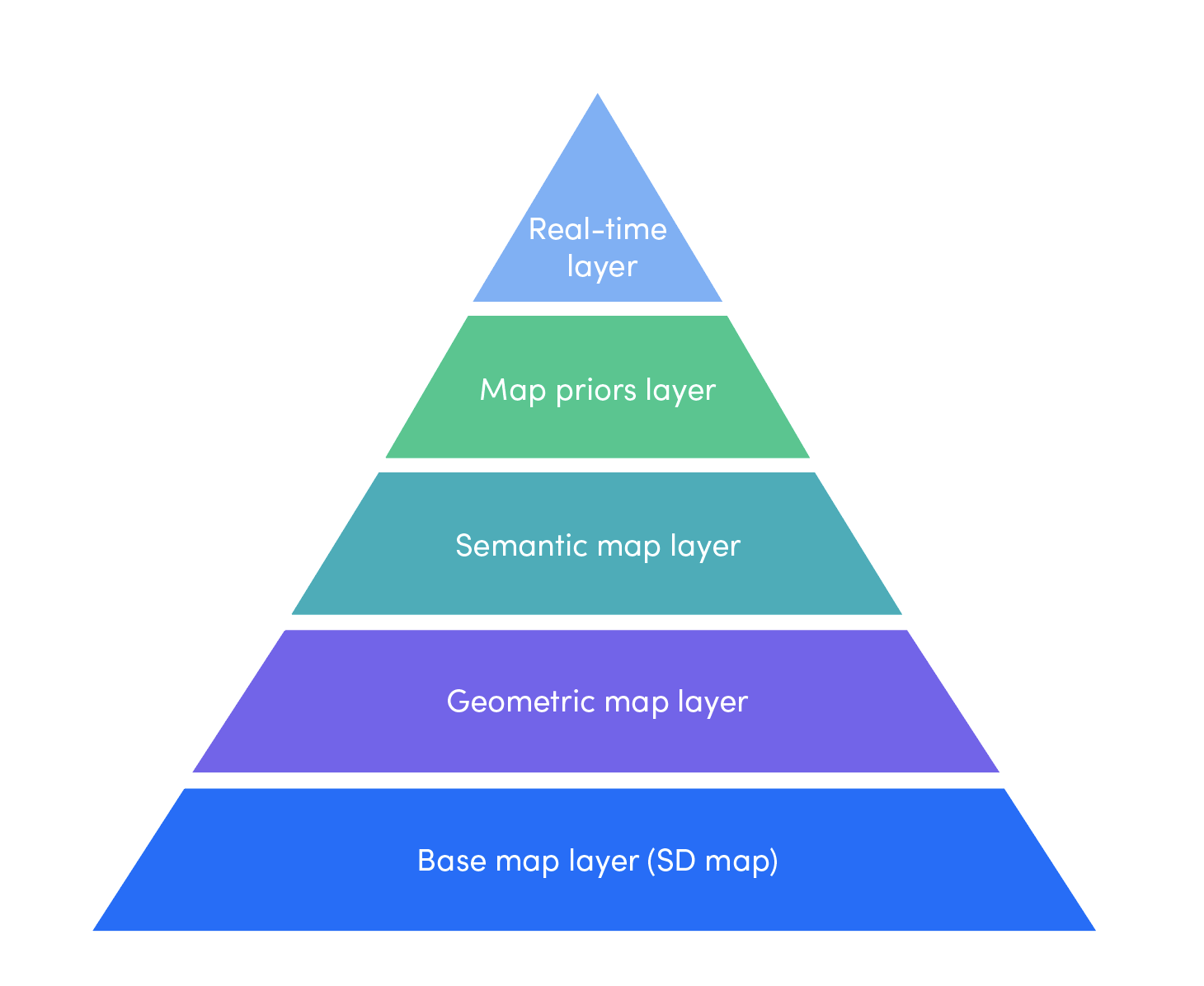
- 각 layer들은 설계, 테스트, 새로운 정보를 표현하는 데 쉽게 독립적으로 구성
Base map
- 웹에서 일반적으로 제공되는 도로지도
Geometric map
- 라이다, 카메라, gps, IMU 등의 raw data들을 SLAM 알고리즘으로 가공하여 3D로 나타낸 정보
Semantic map
- Geo map 위에 오브젝트 표기
- 2D(차선, 교차로, 주차공간), 3D(정지신호, 신호등) 등
- 제한속도, 차선 변경 규칙 등 추가정보 포함
Map priors layer
- 동적 정보나 보행자의 행동 정보들을 포함
Real-time knowledge layer
- 동적인 실시간 교통정보 포함
- 차량간에 공유될 수 있음
ref :
Rethinking Maps for Self-Driving
자율주행 시대에는 왜 정밀지도가 필요할까?
Leave a comment